Dislocation Modeling using GTdef for Modern Geodetic Methods
by Andrew Newman
GTdef is an implementation of the Okada (1985) dislocation model written by Ting Chen and
Lujia Feng, with codes modified from disl written by Peter Cervelli. Okada (1985) can describe the
surface deformation associated with rectangular dislocations of arbitrary orientation within
a purely-elastic, isotropic, poisson-solid, half-space.
Dislocations can be described by either dip-slip, strike-slip, or opening,
and hence can be used to describe a range of processes including earthquake faulting, interseismic
coupling, and planar fluid changes like magmatic dike inflation or groundwater withdrawal.
The code here is developed so that one could perform both forward models that predict ground deformation
and inverse models that use data with errors and some modeling constraints to predict information about the
source. The source in either case can be either simple rectangular slips along the plane, orthogonal to it
or some combination of both. Here, we'll step through first some forward models, and eventually inversions.
However, here, we will only focus on Forward Models; meaning that we will perscribe a fault with a certain deformational character
to it, and then observe the output deformational field.
Okada, Y. (1985). Surface deformation due to shear and tensile faults in a half-space, Bull. Seism. Soc. Am. 75, 1135-1154.
Starting Notes:
Performing models:
- Input File: This is the only documentation other than within the code, and this webpage (which is in development).
As you will be able to see there are a number of ways to both describe the input 'fault' models, as well as output data.
- Simple Planar Forward Models :
- Strike-Slip Faults:
Create a 45 km long vertical (90° dip) planar fault, with 1 meter of right-lateral strike-slip motion,
and slipping to 15 km depth.
- Create input file:
For the output, we will describe the spatial deformation every 2 km across a 60x60 km grid surrounding the deformation.
% echo "
coord local
fault 2 MySSFault 0 -22.5e3 0 22.5e3 0e3 15e3 90 -1 0 0 0 0 0 0 0 0
grid 2kmx2km 0 0 -30e3 -30e3 30e3 30e3 16 16 " > local1.in
- Run GTdef
# within matlab
> GTdef('local1.in',1) % the '1' is for one core
This will create an output file called 'local1_fwd.out'
- Now visualize the output using gnuplot to show the full vector field.
% gnuplot
gnuplot> set size square
gnuplot> set view 60,30,1,.33
gnuplot> splot '< egrep "point 3" local1_fwd.out' u 4:5:(0):($7*1e4):($8*1e4):($9*1e4) w vect ,\
"< egrep MySSFault local1_fwd.out | awk '{print $4,$5,-$8}{print $6,$7,-$8}{print $6,$7,-$9}{print $4,$5,-$9}{print $4,$5,-$8}' " w l lt -1
% use the cursor to move around the data
- Low-Angle Thrust Fault:
Create a 200 km long vertical (30° dipping) planar thrust fault, with 5 meter of thrust motion. The down-dip fault width should be 100 km.
- Another low-Angle Thrust Fault:
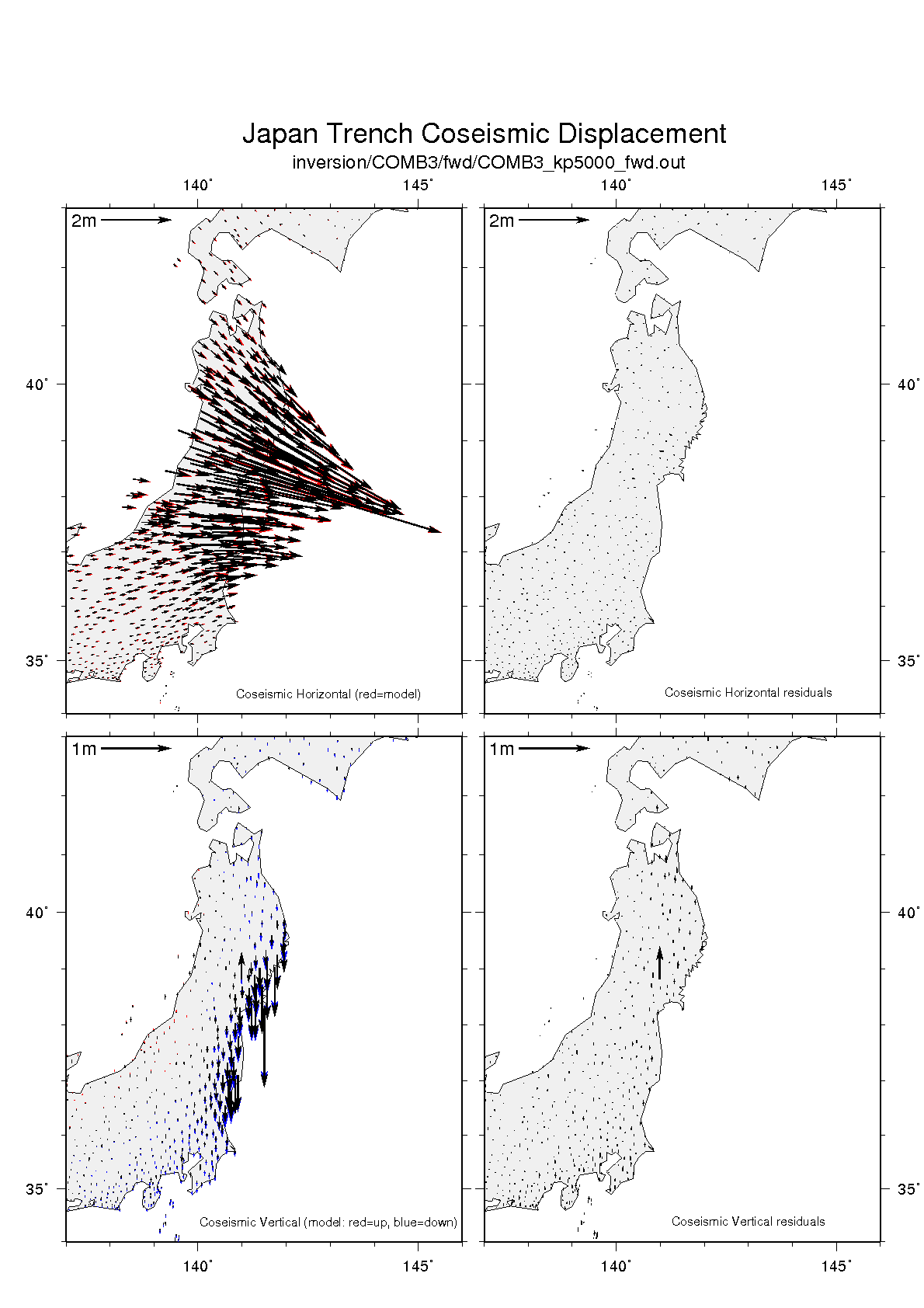
Here is an example of a model solution that we generated for the 2011 Tohoku-Oki Earthquake using both GPS onland and tsunami wave predictions for seafloor displacement.
This was created from an inversion of 128 sub-patches, each allowing for both dip-slip, and transvese motions.
Here is a simple illustration showing the displacement field along the thrust (model is removed from the geographic projection).
Here is a comparison between the lateral and vertical GPS field with the earthquake rupture model.
|
 gatech.edu | Updated:
Wed Nov 20 09:43:35 EST 2013
gatech.edu | Updated:
Wed Nov 20 09:43:35 EST 2013
{kind=link}
{kind=link}